1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
| #!/usr/bin/ python3
# -*- coding: utf-8 -*-
"""分布式多进程 RPC 服务"""
import os
import sys
import json
import errno
import struct
import signal
import socket
import asyncore
from io import BytesIO
from kazoo.client import KazooClient
class RPCServer(asyncore.dispatcher):
zk_root = "/demo"
zk_rpc = zk_root + "/rpc"
def __init__(self, host, port):
asyncore.dispatcher.__init__(self)
self.host = host
self.port = port
self.create_socket(socket.AF_INET, socket.SOCK_STREAM)
self.set_reuse_addr()
self.bind((host, port))
self.listen(1)
self.child_pids = []
# 创建子进程
if self.prefork(10):
self.register_zk() # 父进程 注册 zookeeper 服务
self.register_parent_signal() # 父进程善后处理
else:
self.register_child_signal() # 子进程善后处理
def prefork(self, n):
"""创建子进程 父进程中返回 True, 子进程返回 False"""
for i in range(n):
pid = os.fork()
if pid < 0:
raise RuntimeError()
if pid > 0:
self.child_pids.append(pid) # 父进程,记录下子进程的pid
continue
if pid == 0: # 子进程
return False
return True
def register_zk(self):
"""父进程创建zookeeper连接"""
self.zk = KazooClient(hosts='127.0.0.1:2181')
self.zk.start()
# 创建根节点
self.zk.ensure_path(self.zk_root)
value = json.dumps({"host": self.host, "port": self.port})
# 创建服务临时子节点, 路径后缀索引
self.zk.create(self.zk_rpc, value.encode(), ephemeral=True, sequence=True)
def register_parent_signal(self):
"""父进程监听信号量"""
signal.signal(signal.SIGINT, self.exit_parent) # 监听父进程退出
signal.signal(signal.SIGTERM, self.exit_parent) # 监听父进程退出
signal.signal(signal.SIGCHLD, self.reap_child) # 监听子进程退出, 处理意外退出的子进程,避免僵尸进程
def exit_parent(self, sig, frame):
"""父进程监听到 sigint 和 sigterm 信号, 关闭所有连接所有子进程"""
self.zk.stop() # 关闭 zk 客户端
self.close() # 关闭 serversocker
asyncore.close_all() # 关闭所有 clientsocket
pids = []
# 关闭子进程
for pid in self.child_pids:
print("before kill")
try:
os.kill(pid, signal.SIGINT) # 关闭子进程
pids.append(pid)
except OSError as ex:
# 目标子进程已经提前挂了
if ex.args[0] == errno.ECHILD:
continue
raise ex
print("after kill ", pid)
# 收割目标子进程
for pid in pids:
while True:
try:
# 子进程退出后,父进程必须通过 waitpid 收割子进程,否则子进程会称为僵尸进程
os.waitpid(pid, 0) # 收割目标子进程
break
except OSError as ex:
# 子进程已经被收割过了
if ex.args[0] == errno.ECHILD:
break
if ex.args[0] != errno.EINTR:
raise ex # 被其它信号打断了,要重试
print("wait over", pid)
def reap_child(self, sig, frame):
"""父进程监听到 sigchld 信号, 退出子进程"""
print("before reap")
while True:
try:
info = os.waitpid(-1, os.WNOHANG) # 收割任意子进程
break
except OSError as ex:
# 子进程已经被收割
if ex.args[0] == errno.ECHILD:
return
# 被其他信号打断要重试
if ex.args[0] != errno.EINTR:
raise ex
pid = info[0]
try:
self.child_pids.remove(pid)
except ValueError:
pass
print("after reap", pid)
def register_child_signal(self):
"""子进程监听信号"""
signal.signal(signal.SIGINT, self.exit_child) # 退出子进程
signal.signal(signal.SIGTERM, self.exit_child) # 退出子进程
def exit_child(self, sig, frame):
"""子进程监听到 sigint 和 sigterm 信号, 关闭子进程所有连接"""
self.close() # 关闭所有 server socket
asyncore.close_all() # 关闭所有 client socket
print("all closed")
def handle_accept(self):
"""接收连接"""
pair = self.accept()
if pair is not None:
sock, addr = pair
RPCHandler(sock, addr)
class RPCHandler(asyncore.dispatcher_with_send):
"""处理请求"""
def __init__(self, sock, addr):
asyncore.dispatcher_with_send.__init__(self, sock)
self.addr = addr
self.handlers = {
"ping": self.ping,
}
self.rbuf = BytesIO()
def handle_connect(self):
print(self.addr, "comes")
def handle_read(self):
"""接收请求"""
while True:
connect = self.recv(1024)
if connect:
self.rbuf.write(connect)
if len(connect) < 1024:
break
self.handle_rpc()
def handle_rpc(self):
"""处理一个接收一个完整的请求"""
while True:
self.rbuf.seek(0)
length_prefix = self.rbuf.read(4)
if len(length_prefix) < 4:
break
length, = struct.unpack("I", length_prefix)
body = self.rbuf.read(length)
if len(body) < length:
break
request = json.loads(body.decode())
in_ = request['in']
params = request['params']
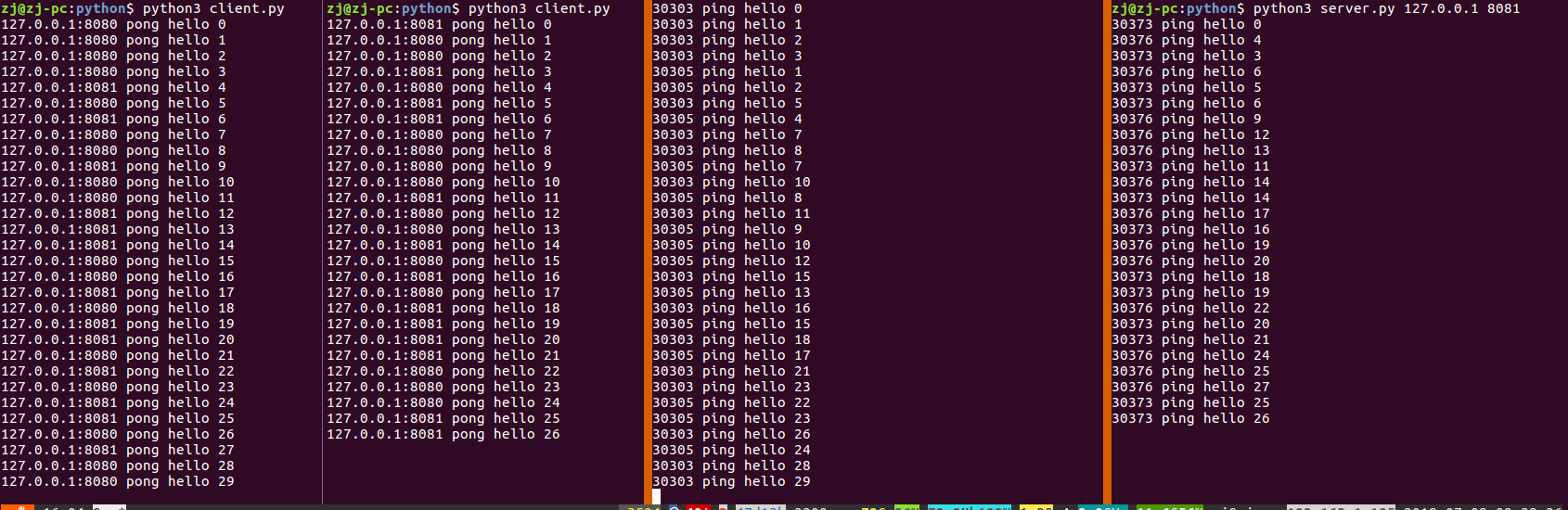
print(os.getpid(), in_, params)
handler = self.handlers[in_]
handler(params)
left = self.rbuf.getvalue()[length+4:]
self.rbuf = BytesIO()
self.rbuf.write(left)
def ping(self, params):
self.send_result("pong", params)
def send_result(self, out, result):
"""给客户端发送消息"""
response = {"out": out, "result": result}
body = json.dumps(response)
length_prefix = struct.pack("I", len(body))
self.send(length_prefix)
self.send(body.encode())
def handle_close(self):
print(self.addr, "bye")
self.close()
if __name__ == '__main__':
host = sys.argv[1]
port = int(sys.argv[2])
RPCServer(host, port)
# 启动事件循环
asyncore.loop()
|